
Dissertation
The emergence and rapid development of technologies that radically change the character of human-computer interaction, most notably that of Virtual Reality (VR) and Telerobotics, call for new approaches in understanding the way the human body operates and communicates within complex informational systems. These are technologies that address the body directly, interacting and encroaching on its sense perception, and therefore should extend and challenge our definitions of bodily self-consciousness.
This text presents ideas from the general literature on embodiment from phenomenology, neuroscience, and psychology. By analysing the biological and virtual structures of everyday perception and subjective thought, it hopes to bring closer the idea of “real life” in virtual space. To that end, the main question this text will try to address is: Is it possible to not only be able to control, act and sense with an avatar but literally feel ‘incarnated’ in its reality?
“New media like virtual reality sometimes force us to take a closer look at what is fundamental about communication. Before paper, wires, and silicon, the primordial communication medium is the body. At the center of all communication rests the body, the fleshy gateway to the mind.”
Frank Biocca, The Cyborg’s Dilemma: Embodiment in Virtual Environments 1997
Having/Being a body
For all that I know and feel – I cannot be identical to my body. When I die, the “I” is dead. My corpse will lie in peace, but I will not – I vanished.
When I am conversing with another person I assume that I am talking to something other than vibrations in the air, or vocal cords, or moving hands. I assume inside this fleshy apparatus to be an identity possessive of thoughts and feelings and aware of itself as an “I” in the same way I am aware of myself. An eerie, creepy feeling is produced when expectations of a ‘ghost inside the machine’ are not met. This phenomenon is called the Uncanny Valley and is most obvious when looking at a robot that was built to look strikingly human but cannot yet act as one. Conversely, seeing a digital character that moves and acts very humanlike, but looks fake or digital produces the same effect. [1]
Throughout this text, I will be looking at these deeply entrenched Cartesian intuitions through the eyes of the phenomenal self. That is, at the phenomenology, the lived experience of the ‘first person’ into which we are born, through which we live, by which we despair, and within die. I will start with how we, as beings in space and of space, make sense of the world around us by delineating boundaries of internal/external spaces of organisms or perceived and imagined living agents and build mental models of representation. An example of what a mental model of representation might be can be found and easily understood when one looks at clinical cases of brain-damaged patients. One such case that I have found particularly striking, is a syndrome called the Capgras Delusion. People suffering from this syndrome claim that people close to them, typically spouses, parents, or children, have been replaced by similar- looking impostors. In some case they will even misidentify themselves as seen in photos, or even in a mirror.[2] William Hirstein, a philosopher and researcher on the human mind, proposed a model based on Representational Theory of Mind to help explain why misidentification syndromes like Capgras Delusion occur. His model, proposes that humans use two mental representation models when dealing with other people: one contains information about a person’s appearance and the other about his mind (emotions, beliefs, intentions etc). A person suffering from Capgras Delusion has lost the ability to represent their parent’s mind while still being able to recognize their outward appearance and thus confabulates that this person must be an imposter pretending to be their parent. It is worth quoting him at length as it describes the process, which he believes to be a fundamental feature of our daily sense of self-awareness and our ability to conduct complex social interactions, that breaks down in a Capgras affected brain:
“When I represent you from my perspective, I am representing you allocentrically. When I represent you from your perspective, by using my brain’s natural mindreading or simulation functions, I am typically representing you egocentrically. One type of egocentric representation of an agent is a (spatial) analogue representation from the unique point of view of that agent, from inside that agent’s head, of processes and events within that agent’s body, including that person’s thoughts. We represent people egocentrically by simulating their current experiences from their points of view, I suggest. The brain achieves this with an egocentric representation system that functions to represent a mind situated in a body, which is in turn situated in an environment, according to the representational hypothesis. This egocentric representation system is responsible for part of our normal sense that we are embodied minds, moving about an environment. This system does not always represent us, however. It has two modes of functioning that we might call self-mode and other-mode. In self-mode, this system represents my mind, situated in my body, situated in my environment. When this system functions in other-mode it represents other people as minds situated in bodies situated in environments. In either mode, the system is egocentric; but different individuals can occupy the ego position of the system. In self-mode, I am the ego at the centre of this system; in other- mode, the egocentric system represents or simulates the egocentric system of a person of interest.
The allocentric system represents people from the outside, including detailed facial representations, as well as representations of entire bodies, or characteristic modes of dress or movement. The skin seems to mark the boundary of what the allocentric system represents, whereas the mental component of the egocentric system represents events occurring inside the skin, as experienced from the point of view of that body’s owner. These egocentric representations involve somatosensory representations, but also involve our awareness of our conscious perceptions, thoughts and emotions. Allocentric representations are primarily visual, but also involve auditory representations, as well as representations generated by other sense modalities.” (Hirstein, 2009, p 116-117)
It is useful to try to construct a spatial phenomenology of the self as moving through space is our primary way of understanding the world and our position within it. We know that three dimensional objects exist because we can move around them and see each of their faces, and we plot intentions and perform actions based on the spatial relations objects bear to our bodies and between themselves. Quassim Cassam writes in “Self and World” (1999) that “in egocentric spatial perception the objects of perception are experienced as standing in spatial relations to the perceiver”, and that such perception “can therefore be described as self-locating; in experiencing objects as spatially related to one, one literally experiences the bodily self as located in the perceived world” .[3] Our sensory-motor engagement with the world provides us with the fundamental primary contact onto which we extend our conscious experience through the use of representational structures and conceptual metaphors.[4] I have access to three dimensional objects by way of my body which moves the centre of my vision around in the world, and I have perception of my body from the inside, and normally my perception is bound the structural shape of my body. By using the brain’s natural simulation functions Hirstein describes, I can displace the centre of my vision, along with my unique view of the world and act as though I have acquired internal access to another person’s body. This is of course achieved through indirect inference and through my subjective past experience with no direct access to any external sensory input. Nevertheless, this distinct ability to simulate being inside another person’s internal space, in the ‘egocentric other-mode’, is perhaps the first step in thinking about the feasibility of avatar embodiment and tele-embodiment. [5]
Both the egocentric and allocentric representations are necessary for normal functioning of body-world relations. In the “Phenomenology of Perception” (1945), Merleau-Ponty describes a patient named Schneider who suffered a brain injury during World War One. Schneider was diagnosed with visual agnosia, also called “mind blindness”. While he could see colours and shapes, Schneider was unable to see objects in their entirety. Moreover, he could not imagine objects not present or point to things he could not see, including parts of his own body. He could manipulate objects and still perform his job with ease, making wallets, and was otherwise intellectually undamaged, but had difficulties performing abstract tasks that bear no relations to a task at hand. Merleau-Ponty describes Schneider as being “tied to actuality” and lacking “liberty”, the liberty “of putting oneself into a situation” (Merleau-Ponty, 1945, p 135). By not having the freedom of a projective capacity, of a ‘stepping back’ to see oneself as an object in the world and role-play oneself performing actions, we are stuck in an existential egocentric tunnel of urgent tasks: “.. . his body is at his disposal as a means of ingress into a familiar surrounding, but not as the means of expression of a gratuitous and free spatial thought” (p 104). Merleau-Ponty further distinguishes between the objective body and the phenomenal body, and concrete and abstract movement. Schneider was able to perform concrete movements but struggled to perform abstract ones. He could not imagine moving his hands in space without actually performing any movement; he is lacking a form phenomenal self-acquaintance or “motor intentionality”.
The phenomenal body is, in more recent definitions, “an integrated inner image we have of ourselves firmly anchored into our feelings and bodily sensations”, also called The Self-Model.[6] As Described by Thomas Metzinger(2009), the self-model is a form representational phenomena produced by the brain that allows an organism to perceive itself as a whole and consciously interact with its inner and outer environment. The theory of the self-model comprises of two core components: the phenomenal-self model (PSM) and the phenomenal model of the intentionality relation (PMIR). We are conscious beings with conscious control over our actions because of these two components working together:” You become a person by possessing a transparent self-model [PSM] plus a conscious model of the “arrow of intentionality” [PMIR] linking you to the world.” (Metzinger, 2003, p 10). We can see the conceptual link to Merleau-Ponty, but what distinguishes Metzinger’s approach is the use of representationalist and neurobiological levels of descriptions. PSM and PMIR are something to be found empirically in the mind sciences he says, perhaps as neural signatures or as a specific stage of the global neural dynamics in the human brain. The PSM content is that of the Ego and is a tool for planning and controlling our behaviour and understanding the behaviour of others. The brain only activates the PSM when it is needed and it is off in unconscious states such as sleep: “Sleep is the little brother of death” (Metzinger, 2003, p 558). He likens the PSM to a pilot that is sometimes needed to control, instrument and remember manoeuvres of an airplane but naturally, half the time this ‘plane’ is on auto-pilot. To take the plane metaphor further, the instruments on the plane that allow for precise, continuous control of movement and for knowledge of about each of its parts, make what we might call ‘the interface’, which in the human brain comes in the form of a body schema.[7] The body-schema is a sophisticated representational model of the physical self, an internal user interface that is continually updated with proprioceptive input from joints and muscles, with input from visual perception, somesthesis, and motor feedback. This body representation is what we rely on to be able to perform trivial actions like walking, sitting upright, reaching for the mouse and coordinate hand movement on a keyboard. It is an internal structural model of the relative position of head, torso and limbs and plays a central role in integrating multi-model perceptual inputs to form a globally consistent representation of the body. [8]
What gives us a “liberty” that is different from most animals is that in addition to multi-sensory body representations, a somatic self, and cognitive models of representations is that we are able to introspect in real-time on our experience. We can mentally represent ourselves as representational systems and turn reflection inwards, introspecting on introspection itself. By way of allocentric representation we are able to step outside of ourselves to achieve an external image of our bodies, a kind of Cartesian “meta-self” and use ourselves as tools in real-time.[9] This might be easier to imagine if we think about the ways in which we can recollect personal memories: we can internally see the event from a personal perspective, as if we were there again reliving the event, or we might represent the memory in such a way that we ‘see ourselves’ from an outside, non-personal perspective, either from another person’s perspective (egocentric other-mode) or from an abstract point of view (allocentric). The difference in each of these cases in not only a slight variation of visual imagery, but is of strong perceptual significance.[10]
Spatial perception we might say is specific class of non-localized ‘sensing’. Consider for example the inaccessibility of the eye to its own visual field, the fact that we could never see ourselves seeing. We could look in the mirror and see our eyes, but we would not see vision itself. Same goes for hearing. As Merleau-Ponty colourfully puts it “my visual body includes a large gap at the level of my head”(Merleau-Ponty, 1945, p 94). Visual experience provides me with images of the world ‘out there’, beyond my bodies boundaries, but I do not localize that experience as being in the eye. By contrast, the sense of touch is localized. I can easily point to the precise location an object has come into contact with the skin. And the peculiarity of this is the resulting experience that this object coming into contact with my skin is an object touching ‘me’ and not just any object, thus setting a spatial content for the experience of ‘my body’ and ‘my sensations’. Merleau-Ponty gives great importance to the idea that by touching, the body can be both an organ and an object of touch. When palping an object to explore its texture and form we are both touching and being touched. And sometimes this can be experienced in a double way. By touching your right hand with your left you can simultaneously carry out the activity of touch and experience being touched both in the object that is touching (left hand) and the object being touched (right hand). [11]
Thus, to draw a preliminary conclusion necessary for building the rest of the argument, I will say that: we orient ourselves within the world by using primarily vision and sound. The physical sensation of our bodies provides us with the point of reference from which we continually construct body-world and self-world relations. There are then two important conditions for embodiment of virtual or tele-robotic bodies: a condition of orientation and a condition of sensation.
As I explain in chapter 2, the first condition, pertaining to the visual and auditory aspects, is in many ways complete enough with current VR systems. It is the haptic and kinaesthetic dimensions that are lacking for a full perceptual experience of virtual bodies. Nevertheless, current experimental research and development in neuroscience and VR are leading us towards our possible “virtual reincarnation”.
Embodiment and Tele-embodiment- Definitions and key elements
Embodiment is the sense of one’s own body; It is a rich and complex sense with many different labels in literature: “bodily self-consciousness”, “corporeal awareness”, “coenaesthesia”.[12] It is often described as a pre-reflective, pre-conceptual kind of knowledge necessary for other types of sensations and knowledge: “Embodiment refers to the biological and physical presence of our bodies, which are a necessary precondition for subjectivity, emotion, language, thought and social interaction” [13]
As suggested by the recent empirical research[14], the sense of embodiment should be looked at in terms of these three main properties: (i)agency, (ii)location and (iii)ownership:
(i) An immediate sense of one’s concrete agency, of a “motor intentionality”. This is Merleau-Ponty’s phenomenal body; The body understood in terms of practical engagement with the world. That I am in this world and I can act corporeally, I can move and push things and I have direct control over each of my body parts.
(ii)Only things that are within body space can be embodied. “We have a sense of ourselves as being bounded and limited objects within a larger space, which can contain other objects” (Martin, M.G.F., 1992, p 199) .According to representational theories, each body part has a spatial correlate part in the body-schema. Tools or prosthesis can also be integrated into an ‘extended body-schema’. [15]
(iii)We have a sense of ownership for our body. A feeling of ‘mineness’ correlated with affective response (Vignemont, 2007); such that we protect our body parts from hazardous situations. We can also experience ownership for objects external to our body; I will describe this in chapter 3.
Tele-embodiment is a term used mostly in the telerobotics sphere, but I will here use it interchangeably either to refer to embodying virtual avatars or to embodying physical robots; “tele”- meaning ‘at a distance’. Whether the distance is physical or virtual does not change the mode of application or conceptual grasp of the ideas involved. In contrast to the phenomenological approach, in VR, the word embodied is commonly used to describe a person with basic visual and motor control over an avatar. I much rather prefer to describe this action as ‘wearing’ rather than ‘embodying’. This is to make clear the gap of perceptual depth currently possible in tele-embodiment.
Embodied action “The world unfolds itself in potential for action” (Gibson, 1962)
Most discussions on the phenomenology of the self and theories of embodiment and perception include a theory of action. James J. Gibson, like Heidegger before him, proposed that the world is a set of “affordances” that stand as cues to what is possible for a perceiver. The state of an organism doing the perceiving is continually changing along with the affordances offered by its environment. When the organism reaches a state where it can run an internal simulation of the actions the environment affords, perhaps by perceptual-motor mechanical simulation, then the organism is in a dynamic relational -mode with its environment – an embodied mode. Merleau-Ponty, who was also influenced by Heidegger, argues that we experience the world in terms of the “I can” which is always oriented towards doing and acting, always in an intentionality relation. He says:
“I can therefore take my place, through the medium of my body as the potential source of familiar actions, in my environment conceived as a set of manipulanda and without, moreover, envisaging my body or my surrounding as objects in the Kantian sense. There is my arm seen as sustaining familiar acts, my body as giving rise to determinate action having a field or scope known to me in advance, there are my surroundings as a collection of possible points upon which this bodily action may operate.” (Merleau-Ponty, 1945, p.105).
Going back to Metzinger’s phenomenal model of the intentionality relation (PMIR), a human subject is not only always in an intentional relation to the world but it is also consciously aware of its intentional states. In conscious volition, an object is always a goal-state (what it affords) and we can, by allocentric representation simulate any terminated bodily action. As the activation of a motor-control program is predated by a simulation of it[16], this affords the PMIR to represent itself as currently interacting with the world, as a system in the act of experiencing – the self in the act of knowing (Damasio 1999, p 130).
Virtual Reality
Brief Overview of VR Systems
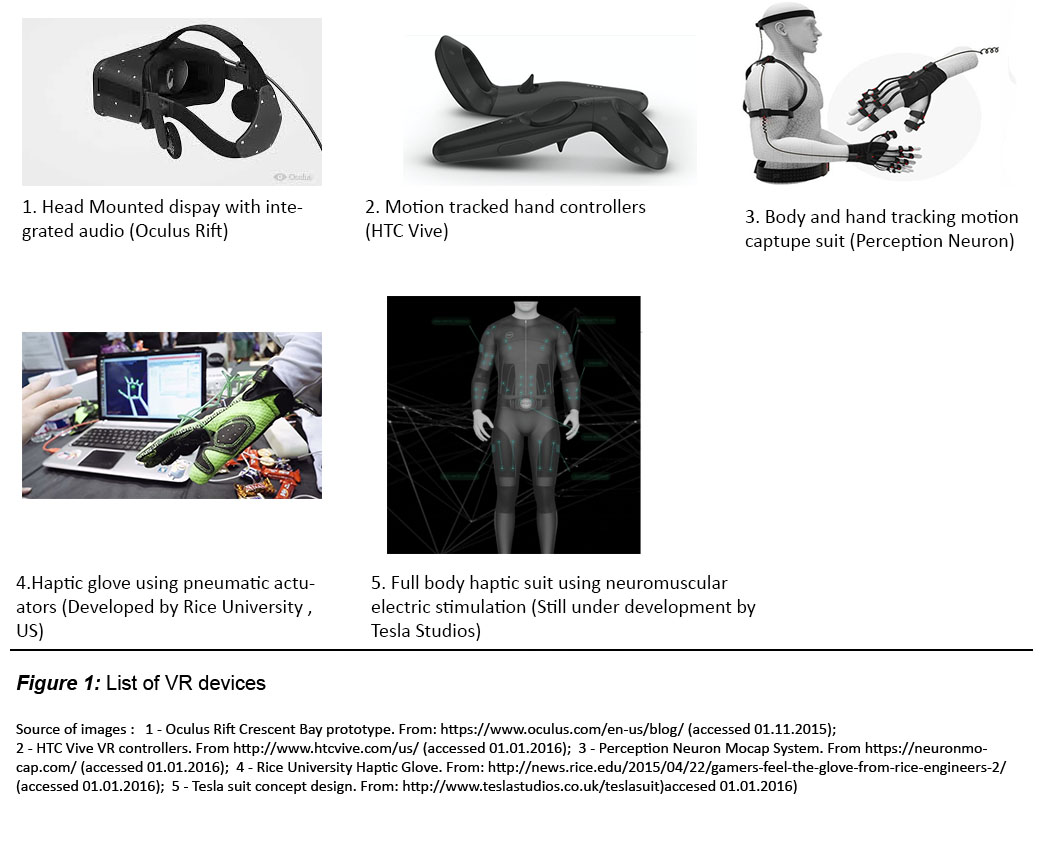
VR is not new- it has been around since the 1960s. It has however, until very recently only been accessible to research and military facilities. The 80’s and 90’s saw a push for commercialisation of an alternate reality, where you can “go anywhere, live anywhere, be anyone, experience anything”, but ultimately failed to live up to its promise. The development of high quality and affordable screen technologies brought about by the popularity and ubiquity of mobile phones, coupled with the increase in computational power and graphics fidelity has brought the cost of VR hardware down considerably, and 2016 will see the commercial releases of various VR head mounted displays (HMD) and other peripherals for interaction (see fig 1). It is considered by many, the birth of a new major computing platform.[17]
VR is more than the computer hardware involved. As a project and concept VR promises “a transcendence of the limits of physical reality”.[18] It sits well within the ancient desire of physical transcendence, of a ‘freeing the mind’ from the “prison” of the body. Some people see it as “the ultimate display” (Sutherland, 1970). In technical terms, VR is a three dimensional computer generated environment that can be explored and interacted with via multi-sensory channels by a person. This upcoming consumer generation of VR will mainly be focused on visuals and audio, and some basic motion controlled hand held devices. Stereoscopic HMDs with two slightly displaced monitors for each eye (more advanced HDMs also have eye tracking- for tracking and adjusting the image according to gaze and for focus on distant objects) are used for providing there-dimensional, life size images of a virtual environment. The headset is tracked in space, usually by one or more external cameras, so that movement in the physical space is matched in real-time 1 to 1 in the virtual world. For interacting and manipulating objects in the virtual world, hand-held controllers or data gloves can be used which are tracked in the same way as the HMD. This is the most basic and most common setup for VR right now. More specialized systems such as could be found in research facilities, use force feedback devices (for example surgical simulations) and inertial motions capture suits or motion tracking systems for full body tracking (for controlling full-body avatars) or for tracking other objects. Haptic suits and gloves are also currently under development, which would allow you to feel virtual objects by neuromuscular electric stimulation or pneumatic actuators.
Expanding beyond the skin
I will here refer to VR as an interface system – VR will be an interface system to cyberspace[19]. Cyberspace is a:
“globally networked, computer sustained, and computer-generated, multidimentional, artificial or ‘virtual’ reality. In this reality, to which every computer is a window, seen or heard objects are neither physical nor, necessarily, representations of physical objects but are, rather, in form, character and action, made up of data, of pure information. […] The dimensions, axes, and coordinates of cyberspace are thus not necessarily the familiar ones of our natural, gravitational environment: though mirroring our expectations of natural spaces and places, they have dimensions impressed with informational value appropriate for optimal orientation and navigation in the data accessed.”(Bennedikt, 1994)
This fully fledged kind of cyberspace does not yet exist and VR is not yet the ultimate interface to such worlds. VR is for now a medium, a medium of communication and data flow, following a paradigm shift from previous computing platforms and mediums. The shift is in terms of the interaction performed to navigate data and where the body is positioned in relation to it. To try to understand what this shift is, let’s compare two interface systems, VR and desktop computer, jacked into the closest thing we have to cyberspace, the online computer platform Second Life. Second Life is a three dimensional social world, where you can explore user generated virtual environments, interact with people, buy virtual property, go to concerts, visit virtual shops and buy real physical things. It even has its own virtual currency exchangeable for real world money. [20]
First let’s consider the visuals – monitor vs stereoscopic HMD. The fact that a monitor is usually relatively small compared to the size of our natural field of vision (around 180 horizontally and 90 vertically) should not be a determining factor in how natural the visual interaction feels as we can easily imagine having a frame (like looking through a small window) that is smaller than our full field of view and that will still be a natural, albeit more cumbersome, “tunnel” vision. HMD’s usually have a relatively wide field of view, although still not always as wide as 180, so no major difference between the two there. Stereoscopy does help with depth perception and, as we normally have stereoscopic vision, this makes VR feel a bit more natural. The real difference is however the tracking of the HMD in absolute space. In both cases, when moving towards an object the image of that object expands. In the case of desktop however, we move towards and object by the use of a button press while in real life as in VR we move towards an object by leaning in or walking towards it. Thus, although in both cases what is seen is an image, in VR an illusion of a stable world ‘out there’ is created as the images change in real-time with accordance to the player’s position and orientation in physical space. Going back to Qasam’s theory (“in experiencing objects as spatially related to one, one literally experiences the bodily self as located in the perceived world”), if in VR we experience the objects we see as spatially related to our bodies, then we would have the first conditions of embodiment, that of orientation and location. Then we might say, if the world is perceived in terms of scale in relation to our bodies (or this case a representation of our bodies) then the bodily self is experienced as located in the perceived world. Having a life size representation of the player’s hands, or if a full body motion capture is used for full body representation, impacts how one perceives size of external objects. As demonstrated by an experiment in which adults were asked to wear the avatar of 4-year old child body[21], having a smaller body in VR results in an overestimation of perceived object size. Moreover, there were other psychological effects produced as a consequence of being in the body of a 4-year old that were not related to the relative perception of body parts and external objects.[22]
The default perspective on desktop in Second Life is a third-person perspective of a customizable avatar, usually with predetermined movement patterns that can be activated via keyboard. As many studies have shown, a deep psychological connection with the avatar can be created, even though this avatar is graphically displayed as an object external to our bodies. [23] The avatar in second life is an image of the physical self, even though this image might be constructed to look totally different. It is in many ways like looking in the mirror to see a virtual image of you; i.e. a distorted image shaped by cultural norms, desires, emotions etc. The crucial distinction between this perspective and the VR, is that this is predominantly within an allocentric frame of reference, where you are essentially role playing an avatar within these worlds. It is an agentive version of the red arrow on the city map with the inscription “you are here”.
In terms of movement and control, on desktop in contrast to VR, agency is not localized practically; it is cognitive agency that is directed within the game’s world relations, while the motor agency is directed towards keyboard and mouse. While the end-goal is moving the avatar or performing some motor action in the game world, the motor-simulation is not that of movement of arms and legs for reaching or walking, but that of movement of fingers and hands on the keyboard.
Body Representations
The general idea of the theory of Body Representations is that some form or representation or image of the body is stored in the brain. One of the first to take up on this theory was Carl Wernicke (1906) who argued that there is a deep correspondence between the cells in motor cortex and sensory organs. He emphasized the spatial aspect of somatosensory perception and how these contribute to a general geography of each body part in space. By integrating external inputs (tactile, visual, auditory) together with internal inputs (sensation of muscular activity, joints, viscera), a unified image of the body is formed, which he called “body concioussness” or “somatopsyche”. [24] This unified image can be disrupted, and the boundary of physical sensation is not always marked in the flesh, but can be extended to rubber, pixels and phantoms. The majority of people, who have had a limb amputated, experience a phantom limb. A phantom limb is a vivid sensation that a lost body part, for example an arm, is still present, it can be felt, moved and even “touched” by objects. A phantom limb is described to be as real and sometimes as “more real” than a physical limb (Ramachandran, 1998).
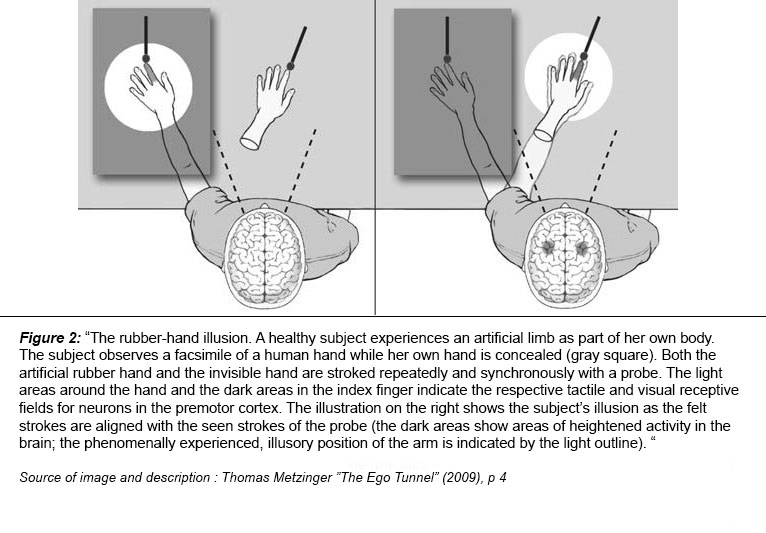
A similar body experience has been reproduced experimentally. Altering the normal association between touch and its visual correlate can result in the illusory incorporation of a fake limb into our body representation. In 1998 Matthew Botvinick and Jonathan Cohen demonstrated this in an experiment called “rubber hand illusion” (RHI)(fig 2). This experiment shows that is surprisingly easy to induce self-attribution of external objects and notably, this illusion can also be performed in VR.[25]
Out of body experiences
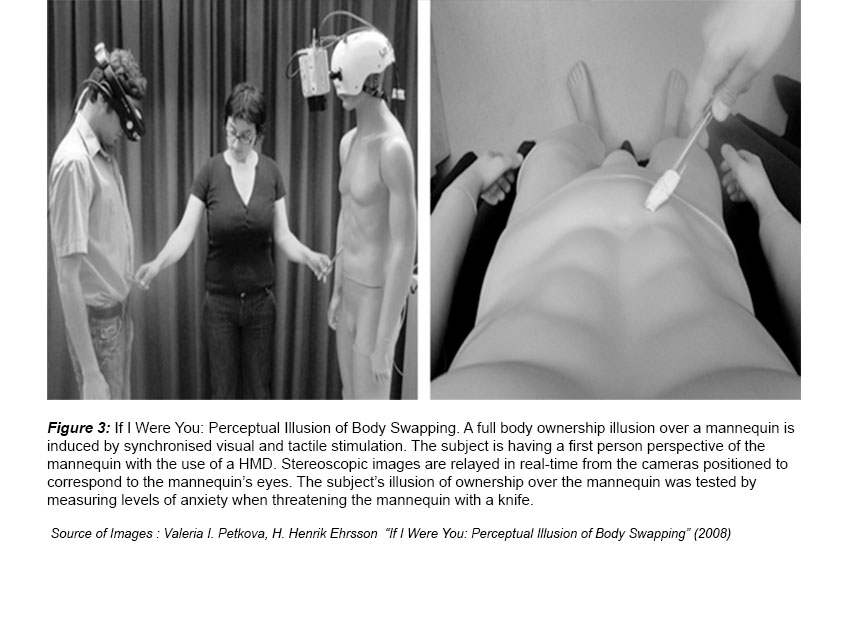
Out of body experiences are phenomenal states in which a person has a concrete feeling of being outside his or her physical body. It is a highly realistic illusion of leaving the physical body and moving outside of it, usually in the form of an etheric double. According to Metzinger, during an out of body experience, a person experiences two representations of the body: the visual one, which is seen from the outside looking back the physical body, and the felt one, which is the sensation of hovering in space. Phenomenologically, the subject of experience is located in the felt representation, i.e. the PSM content, the ego, is located in the double (Merzinger, 2009, p 82-84). Out of body experiences are normally produced by clinical disorders, but a similar illusion has been induced by the “Video Ergo Sum” experiment. [26] Also, a body ownership illusion over a dummy (fig 3) showed that a whole body analogue of the rubber hand illusion is possible.
4. Summary of ideas
“To be a body is to be tied to a certain world…our body is not primarily in space: it is of it” (Merleau-Ponty, 1945, p. 148).
Spatial perception is on all levels of experience: somatic, emotional, linguistic- fundamental. Evidence from neuroscience psychology and discussions in phenomenology indicate that our spatial experience, including the bodily one, involves the integration of different sensory inputs within two different reference frames: egocentric and allocentric. These frames help us representing the locations of entities in space, including ourselves.
We are grounded within a fixed point, into a centre of all experience through motility and body sensations. By means kinaesthesia – the sense of the position and movement of muscles and joints – my own body is the constant reference of my orientation in the perceptive field. The skin marks the spatial boundary as to what is ‘my own sensation’, but this as we have seen can be disrupted or extended. As such, the subject is inseparable from its relations with the world. The subject and the world are ‘‘born together’’.
“Our biological body is not always experienced as our own, and we do not experience only our biological body as our own.” (Vignemont, 2010, p 3)
The brain’ representation of the body is plastic. It is surprisingly easy to generate the illusion in people that their body has changed or manipulate structure, size and morphology of their body image. People are also able to extend perceptual awareness beyond their structural shape and integrate objects, virtual or physical, into their body-schema. The reverse is also possible as shown by body awareness disorders like Asomatognosia, characterized by a disowerneship of the body (partially or entirely).[27] Ownership of avatars, if considered as a form of representation of the body, can also be looked at in terms of the allocentric(usually arising from the graphic display of a third-person view) or egocentric frame(fully tracked VR avatar). While allocentric ‘owned’ avatars are psychologically a form of the self, with self- specific emotional attachment to it, it does not bring with it the phenomenology of a ‘first person’, as can be clearly seen by the difference in spatial representation and spatial perception of objects in relation to the physical body.
To the question whether we are bodies or we have bodies we should answer that in the strict sense ‘we are bodies’. Nevertheless, the body is neither an internal subject nor a fully external object of experience with the PSM standing in a functional relation to such object. We cannot say that we “have” or “own” a body as the body is itself the agents of all perceptual acts. Inside the ‘first-person’ , the experience of my body feels paradoxical and bring un-ease insofar as, on the one hand I cannot detach myself from my body- I am my body, but I also feel that I am not imprisoned in flesh. This is perhaps because the self-model, the I, does not always occupy the same spatial location as the body. That is relative to itself, my subjective experience doesn’t have to occupy the same space as my body- i.e. RHI and OBE’s. We can think, feel and perceive from the point of view of a virtual body. It is through representational models of reality that this kind of “freedom from flesh” becomes possible.
On the cognitive level humans already possess the means of living externally to our physical body. As we have seen OBEs are cases where the PSM is phenomenologically located outside the physical body. Dreams are perhaps another form of such phenomenal states[28]. Through embodied simulation theory and the discovery of mirror neurons[29] we know that, exactly the same neural structures are activated when performing mental simulation of action or physical action. Meaning that the difference between a simulation and performance of an action is not as fundamental as it might be intuitively thought of. These simulation mechanisms also allow us to achieve a second-order representation of ourselves, a ‘meta-representation’, responsible for self-awareness and the awareness of others. We are able to mentally simulate action-states in part due to the unified three dimensional representation of the body, the so called “human body phantom” or “soul body”, and it this soul that can perhaps be drifted inside a virtual body.
The two body ownership illusions discussed, show that visuo-tactile correlations might be sufficient for a strong feeling of tele embodiment. With upcoming haptic devices for full body tactile feedback and with high precision motion capture for visuo-motor control, a collapse of psychological and physical distance between a body and avatar/robot might be possible. Of course, there are still limitations in terms of simulating vestibular and gravitation cues (if there are different in the VR space) or simulating proprioceptive signals from muscles and joints, although some glimpse of that has been shown by studies on postural illusions that showed that by vibrating muscle tendons, the proprioceptive feeling of arm movement can be induced. [30] Thus we could say that, at least to some extent, virtual reincarnation is probably closer than our bodies might expect. Indeed, in many ways our everyday ‘first person experience’ is already virtual. Daydreams, story-telling, cinema…We can so easily drift off and get lost in so many places, so many bodies and minds. And soon, bodies will get lost, hopefully only temporarily, in computer generated bliss. We will all stand as witnesses to what these drift rides might ‘embody’.
“I want to be free to cruise the wires and molest people’s appliances” (Derry, 1996, p 248)
[1] The original hypothesis was proposed by Masahiro Mori (1970). The human response to a very near lifelike robot is often described as the feeling of being near a corpse – a moving corpse or a zombie.
[2] For a more detailed explanation see William Hirstein’s paper “The misidentification syndromes as mindreading disorders” (2010).
[3] Cassam 1999, p 52-53, as cited by John Schwenkler in “Vision, Self-Location, and the Phenomenology of the ‘Point of View’ (2012).
[4] Based on Lakoff and Johnson’s theory of the human conceptual system as fundamentally metaphorical in character (Lakoff, Johnson, 1980) and that concepts emerge directly from our experience with the world. For example, spatial orientations (Up-Down, In-Out, Near-Far) produce linguistic constructs like: “Things are looking up. We hit a peak last year, but it’s been going downhill ever since. Things are at an all-time low” – these constructs are based on the metaphor ‘Good Is Up’.
[5] The simulation is not just perception of familiar person based on visual information but it includes a form of embodied experience, with relevant evoked emotions, spatial understanding, and object directed intentions and sensory-motor integration. This is why, for example you can improve your tennis skills by just watching someone else play or feel the pain of someone being hurt; See for example Harold Bekkering et al. “Joint Action: Neurocognitive Mechanisms Supporting Human Interaction” (2009).
[6] Thomas Metzinger “The Ego Tunnel” (2009) page 7.
[7] The body-schema is part of a larger mental representation that gives us the sense of our body as a unique object in the world; See Matthew R. Longo et al., “Self awareness and the body image” (2009)
[8] See Michael S.A. Graziano and Matthew M.Botvinik “How the brain represents the body: insights from neurophysiology and psychology”(2002) ; I will come back to body representations in chapter 3.
[9] See Iriki & Sakura, “The Neuroscience of Primate Intellectual Evolution”(2008) : “If external objects can be reconceived as belonging to the body, it may be inevitable that the converse reconceptualization, i.e., the subject can now objectify its body parts as equivalent to external tools, becomes likewise apparent. Thus, tool use may lead to the ability to disembody the sense of the literal flesh-and blood boundaries of one’s skin. As such, it might be precursorial to the capacity to objectify the self. In other words, tool use might prepare the mind for the emergence of the concept of the meta-self, which is another defining feature of human intelligence.”
[10] Mentalizing whether the other person is understood using an egocentric (“you”) or an allocentric (“he/she/they”) changes the perceptual and emotional content of the experience. For example a common therapy for managing stress after a traumatic event is trying to imagine the event form a third person, which reduces the emotional response; See Frederique de Vignemont “Egocentrism, allocentrism, and Asperger syndrome“(2005)
[11] The first to analyse touch and vision and touch this way was Edmund Husserl(1952). He says : “The body as such can be constituted
originally only in tactuality and in everything localized within the sensations of touch, such as warmth, cold, pain, and the like ” . Consequently, “A subject with eyes only could not have an appearing body at all” – as quoted by Taylor Carman in “The Body in Husserl and Merleau-Ponty”(1999).
[12] “bodily self-consciousness” (Bermu´dez, 1998; Legrand, 2006), “corporeal awareness” (Berlucchi & Aglioti, 1997; Critchley, 1979), “coenaesthesia” (Critchley, 1953) – as cited by Matthew R. Longo et al., “What is embodiment? A psychometric approach” (2007).
[13] Quote from Musical Identities, Macdonald, Hargreaves and Miell. Oxford University Press, Oxford and New York, 2002
[14] Investigating body-ownership through the study of the conditions of embodiment for an object to be experienced as one’s own: “E is embodied if some properties of E are processed in the same way as the properties of one’s body” – Frederique De Vignemont “Embodiment, ownership and disownership”(2010); See also Matthew R. Longo et al., “What is embodiment? A psychometric approach” (2007).
[15] See Helena De Preester & Manos Tsakiris “Body-extension versus body-incorporation: Is there a need for a body-model?”(2009).
[16] The motor system is part of a simulation network related to action with the function of anticipating the form of execution and providing the self with information about the feasibility and meaning of potential actions; see Jeannerod “Neural Simulation of Action: A Unifying Mechanism for Motor Cognition”(2000).
[17] VR represents the “forward edge of multimedia” (Biocca & Meyer, 1995, p 185) along with AR (augmented reality) with companies like Google( Magic Leap) , Facebook(Oculus) , Microsoft (HoloLens).
[18] Frank Biocca & R. Levy, “Communication in the Age of Virtual Reality” (1995); another relevant quote from the same book: “Communication in the age of virtual reality is in some ways about transportation. Tele-presence replaces tele-vision. The body’s sensorimotor channels are conveyed to distant real and virtual worlds. Experience is transmitted. Transmission and transportation share more than a common root word. “(p 20)
[19] The terms VR and cyberspace are sometimes used interchangeably, but as we have a variety of media that all in some way or another are a means of access to global communications which is now synonymous with the internet, it is more adequate to talk about VR systems as another platform, alongside desktops, laptops, phones, smart watches etc.
[20] For a more detailed description on second life and other similar social platforms see Brian E. Mennecke et al. “Second Life and Other Virtual Worlds: A Roadmap for Research”(2008)
[21] See Domna Banakou, et al. “Illusory ownership of a virtual child body causes overestimation of object sizes and implicit attitude changes”(2013).
[22] There was behavioural changes observed that corresponded to how a 4-year old would see and act. A similar experiment showed that wearing a dark skinned avatar reduces racial bias: Peck T, Seinfeld S, Aglioti S, Slater M. “Virtual reality embodiment can reduce implicit racial bias” (2013).
[23] See Simon Evans “The self and Second Life: A Case Study Exploring the Emergence of Virtual Selves” (2011).
[24] As described by Corradi-Dell’Acquoa & Raffaella Rumiati in “What the brain knows about the body: evidence for dissociable representations”(2007).
[25] By using a data glove controlling a virtual hand of an avatar Sanchez-Vives et al. “Inducing Illusory Ownership of a Virtual Body
2010) showed that a virtual hand illusion can also be induced through visuo-motor correlations.
[26] The experiment was designed to disrupt the spatial unity between the self and the body. Participants viewed the back of their bodies filmed by a distance of 2 metres and projected onto a stereoscopic HMD. Thus they would see from a third person perspective their “virtual bodies”. The participant’s backs were stroked synchronously, in a similar fashion to the rubber hand illusion. After the experiment participants were asked to walk towards the location where they thought their physical body was located during the experiment. Most participants mislocalized their position closer to that of the virtual body; See Lenggenhager et al., “Video Ergo Sum: Manipulating Bodily Self-Consciousness”(2007).
[27] Following a brain lesion, patients deny ownership of one of their limbs, and can attribute it to another individual: “Examiner: Whose arm is this? patient: It’s not mine. Examiner: Whose is it? Patient: It’s my mother’s. (…) Examiner: So, where is your left arm? Patient: It’s under there (indefinite gesture forwards).” (Bisiach et al., 1991, p. 1030).
[28] OBEs are often described as dreamlike. Lucid dreaming is phenomenologically very similar to the experience of an OBE (Metzinger, 2003, p 529-544)
[29] See Galesse & Goldman “Mirror neurons and the simulation theory of mind-reading” (1998).
[30] See R. Longo & Haggard “What is it like to Have a body?” (2012).
Bibliography:
Banakou, D., Groten, R., Slater, M. 2013 “Illusory ownership of a virtual child body causes overestimation of object sizes and implicit attitude changes” Proc Natl Acad Sci U S A., 110(31), p 46-51
Biocca, F. 1997 “The Cyborg’s Dilemma: Embodiment in Virtual Environments” Media Interface & Network Design, Accessed January 10, 2016. http://web.cs.wpi.edu/~gogo/hive/papers/Biocca_1997.pdf
Biocca, F., & Levy, M. R. 1995. Communication in the age of virtual reality. Hillsdale, NJ: Lawrence Erlbaum Associates.
Bisiach, E., Geminiani, G. 1991. Anosognosia related to hemiplegia and hemianopia. Oxford University Press
Bennedikt, M. 1994. Cyberspace. Cambridge, The MIT Press
Bekkering, H., De Bruijn, E. R. A., Cuijpers, R. H., Newman-Norlund, R., Van Schie, H. T. and Meulenbroek, R. 2009 “Joint Action: Neurocognitive Mechanisms Supporting Human Interaction” Topics in Cognitive Science, 1, p 340–352.
Botvinik, M & Graziano 2002 “How the brain represents the body: insights from neurophysiology and psychology” Common Mechanisms in Perception and Action: Attention and Performance, Vol. 19
Carman, Taylor 1999 “The Body in Husserl and Merleau-Ponty” Philosophical Topics, Vol 27, No 2, p 205-226
Cassam, Q. 1999. Self and World. Oxford University Press.
Corradi-Dell’Acquoa, Rumiati, R. 2007 “What the brain knows about the body: evidence for dissociable representations” Brain development in learning environments: Embodied cognition and perceptual learning, Chapter: 4, p 50-64
Damassio, A 1999, The Feeling of What Happens: Body and Emotion in the Making of Consciousness. Harcourt Incorporated.
Dery, M. 1997 Escape Velocity: Cyberculture at the End of the Century.
Evans, S. 2011 “The Self and Second Life: A Case Study Exploring the Emergence of Virtual Selves” Springer Series in Immersive Environments p 33-57.
Gallese, V., Goldman, A. 1998 “Mirror neurons and the simulation theory of mind-reading” Trends Cogn Sci. 2(12):493-501.
Gibson, J. 1962 “Observations on Active Touch” Psychological Review, Vol 60, No 6, p 477-491.
Hirstein, W. 2009. Confabulation: Views from Neuroscience, Psychiatry, Psychology, and Philosophy. Oxford University Press.
Hirstein, W. 2010 “The misidentification syndromes as mindreading disorders” Cogn Neuropsychiatry. 15(1), p 233-60.
Husserl, E. 1952 Ideen zu einer reinen Phänomenologie und phänomenologischen Philosophie. Zweites Buch: Phänomenologische Untersuchungen zur Konstitution. Husserliana
Iriki, A., Sakura, O. 2008 “The neuroscience of primate intellectual evolution” RIKEN Brain Science Institute
Saitama, p 351-0198
Jeannerod, M. 2001 “Neural Simulation of Action: A Unifying Mechanism for Motor Cognition” NeuroImage 14, S103–S109
Leggenhager, B., Tadi, T., Metzinger, T., Blanke, O. 2007 “Video Ergo Sum: Manipulating Bodily Self-Consciousness” Science. 317(5841):1096-9.
Martin, M.G.F., 1992, “Sight and touch”, in T. Crane (ed.), The content of experience, Cambridge: Cambridge University Press, 199–201.
Merleau-Ponty, Maurice. 1945. Phénoménologie de la perception. trans. C. Smith, Routledge and Kegan Paul 1962
Mennecke, B., McNeill, D., Roche, E., Bray, D., Townsend, A. 2008 “Second Life and Other Virtual Worlds: A Roadmap for Research”
Metzinger, T. 2009. The Ego Tunnel. Basic Books
Metzinger, T. 2003. Being No One. The MIT Press.
Mori, M. 1970 “The Uncanny Valley” Energy, 7(4), pp. 33-35
Petkova, V., Ehrsson, H. 2008 “If I Were You: Perceptual Illusion of Body Swapping” PLoS ONE 3(12): e3832
Preester, H., Tsakiris, M. 2009 “Body-extension versus body-incorporation: Is there a need for a body-model?” Phenom Cogn Sci
Longo, M., Schuur, F., Tsakiris, M., Haggard, P. 2007 “What is embodiment? A psychometric approach” Science Direct, Cognition 107, p 978–998
Longo, M., Schuur, F., Tsakiris, M., Haggard, P 2009 “Self Awareness and the body image” Acta Psychologica 132, p 166-172
Longo, M., Haggard, P. 2012 “What is it like to have a body”
Peck T, Seinfeld S, Aglioti S, Slater M. “Virtual reality embodiment can reduce implicit racial bias” Conscious Cogn. 2013;22(3), p 779–787.
Ramachandran, V., Blakeslee S. 1998. Phantoms in the Brain. William Morrow Paperbacks
Lakoff, George & Mark, Johnson 1930 “The Metaphorical Structure of the Human Conceptual System” Cog Science 4, p 195-208
Slater, M., Perez-Marcos, D., Ehrsson, H., Vives, M. 2009 “Inducing Illusory Ownership of a Virtual Body”
Front Neurosci. 3(2), p 214–220.
Schwenkler, John 2012 “Vision, Self-Location, and the Phenomenology of the ‘Point of View’ Noûs, 48, p 137–155
Sutherland, I. 1970 “The Ultimate Display” Information Processing Techniques
Vignemont, F. 2010 “Embodiment, ownership and disownership” Consciousness and Cognition, Elsevier, p 1-12
Vignemont, F. 2005 “Egocentrism, allocentrism, and Asperger syndrome” Consciousness and Cognition, Volume 14, Issue 4, p 719-738
Vignemont, F. 2007 “Habeas Corpus: The Sense of Ownership of One’s Own Body” Mind & Language, 22, p 427–449
Other sources:
http://maverickphilosopher.typepad.com/maverick_philosopher/2012/09/am-i-a-body-or-do-i-have-a-body.html/ visited 15/12/2015
http://phantomself.org/questioning-capgras-2/ visited 15/12/2015
http://www.iep.utm.edu/emotion/#SH4c visited 15/12/2015
Gallagher, Shaun, and Dan Zahavi. 2013. The Phenomenological Mind. Routledge.
Nicholas Humphrey “Consciousness: The ghost in the machine” (2012), Documentary on Youtube. Visited 15/12/2015
Philippe Fuchs, Guillame Moreau, Pascal Guitton , Virtual Reality: Concepts and Technologies , 2006
Jim Blascovich, Jeremy Bailenson , Infinite Reality: Avatars, Eternal Life, New Worlds, and the Dawn of the Virtual Revolution, 2011
Stelarc, Prosthetics, Robotics and Remote Existence: Postevolutionary Strategies , 1991
Thomas Schubert and Jan Crusius, Five Theses on the Book Problem: Presence in Books, Film and VR , 1994
